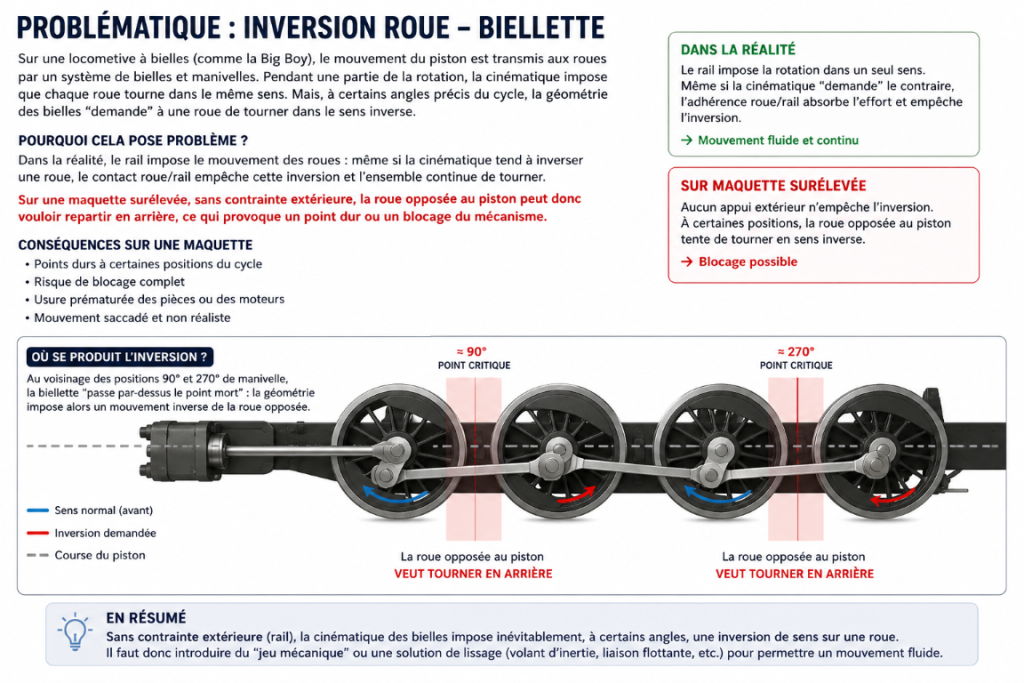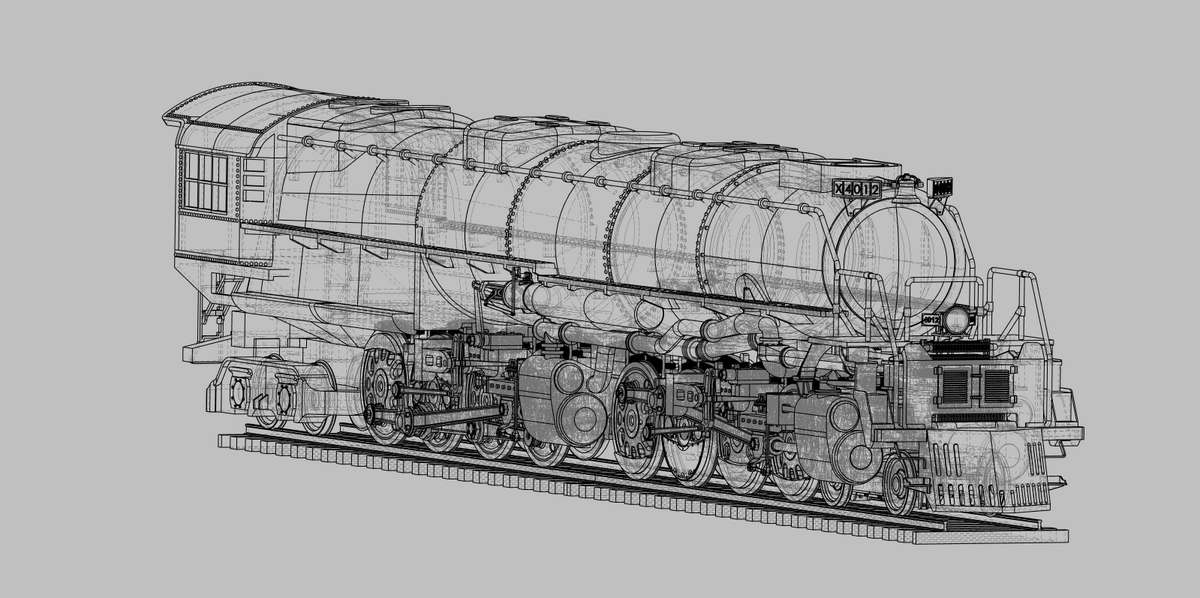
Blocage des roues !
Dans une vraie loco vapeur :
les roues sont forcées par le rail
donc même si la cinématique des bielles passe par un point “imparfait”, tout continue à tourner
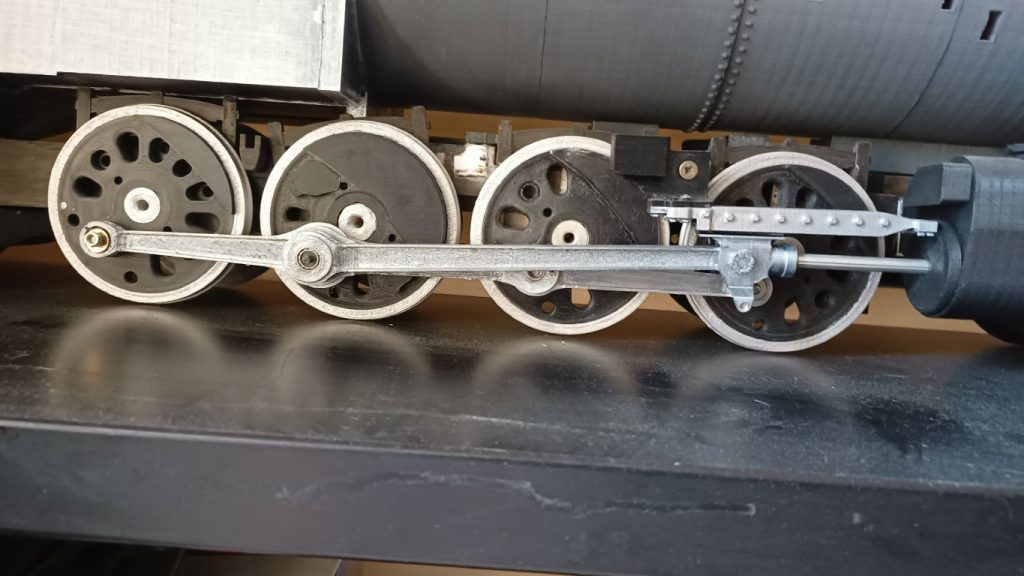
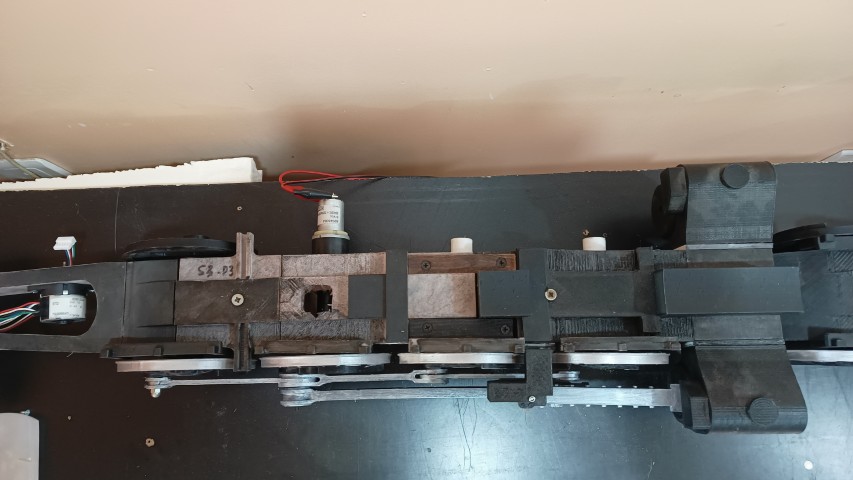
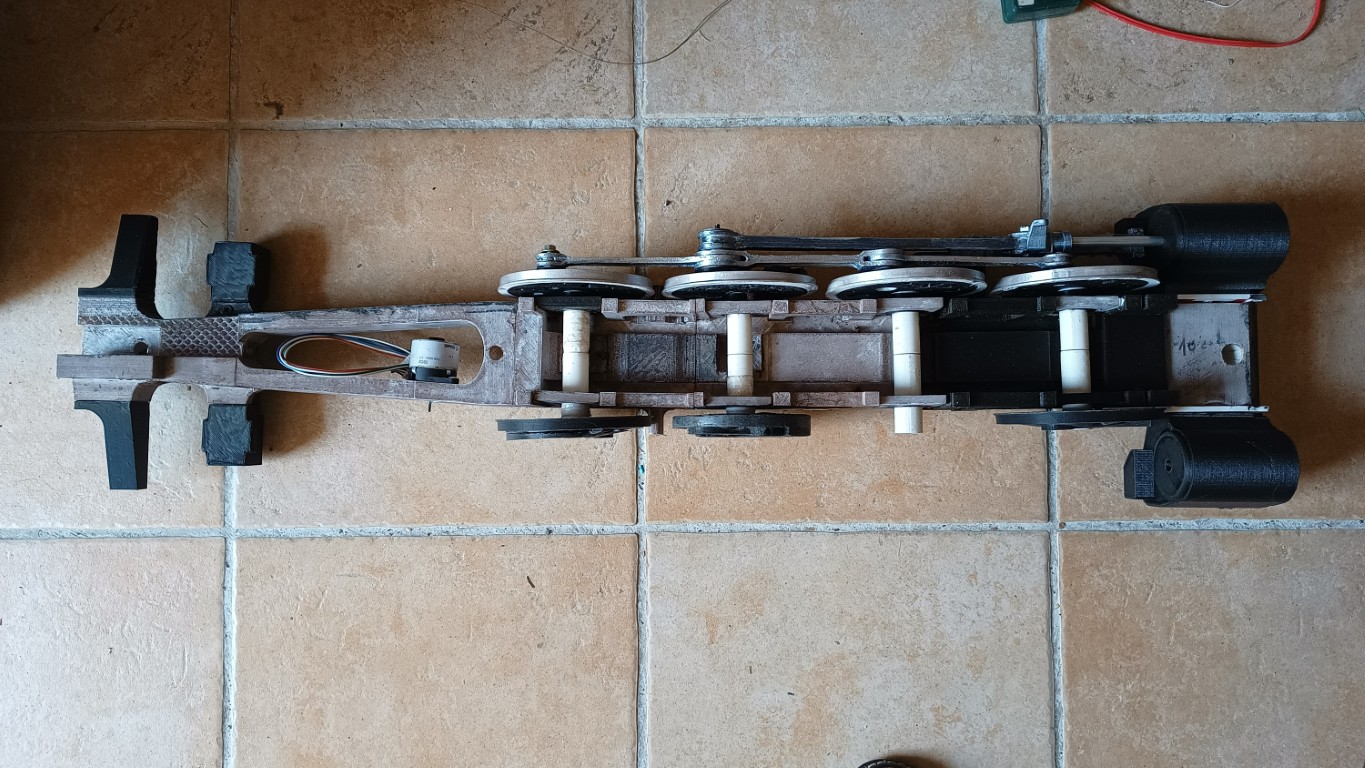
Dans mon cas, les roues sont dans le vide (maquette surélevée et ne bouge pas) :
aucune contrainte extérieure (pas de rail moteur)
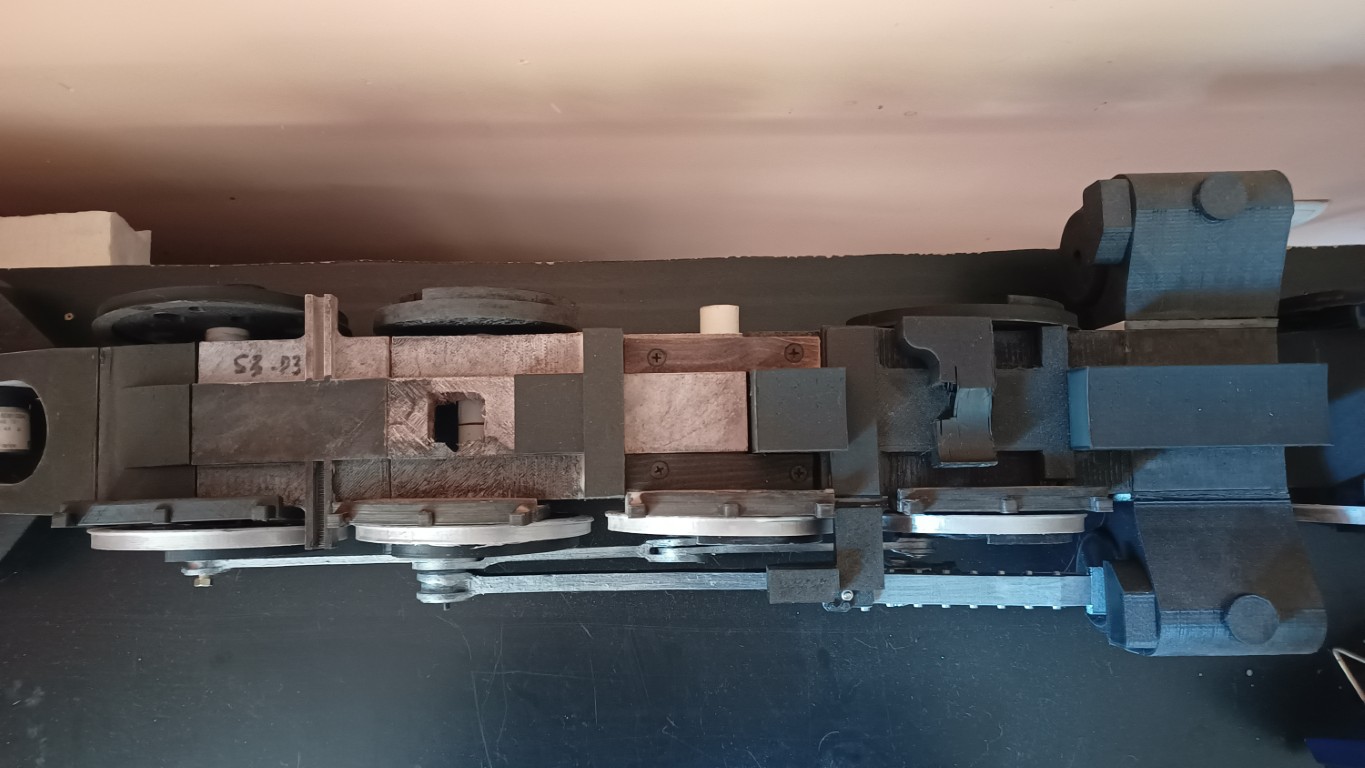
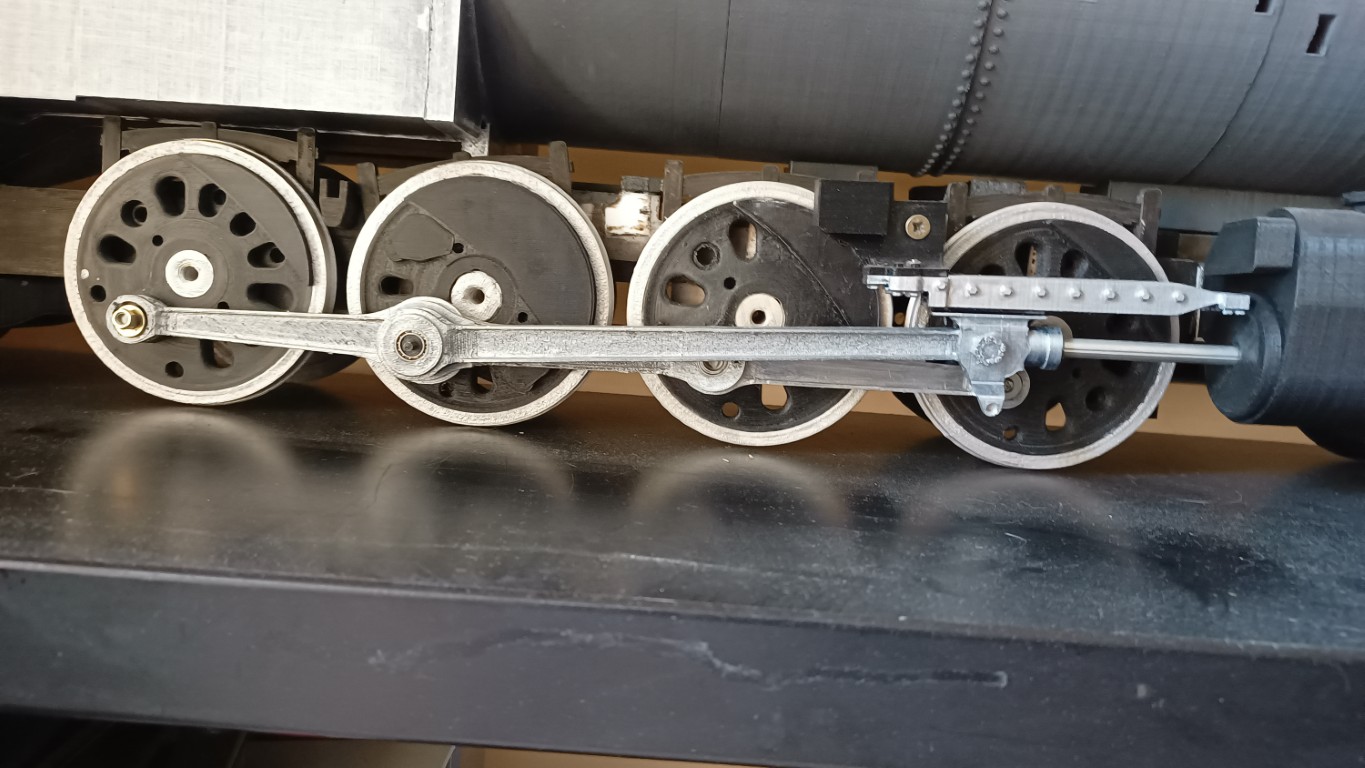
les bielles imposent une géométrie hyper contraignante, résultat : à certaines positions (souvent proches des 90° / 270° du maneton), une roue “veut aller dans un sens” l’autre dans un autre
à certaines positions (souvent proches des 90° / 270° du maneton), une roue “veut aller dans un sens” l’autre dans un autre
 conflit mécanique = blocage
conflit mécanique = blocage