Un automate humanoïde représentant un Chef de gare SNCF des années 1980 animera mon réseau miniature ferroviaire et interagira avec les visiteurs.
C'est un autre gros projet débuté le 3 août 2025.
Principe Général
Structure :
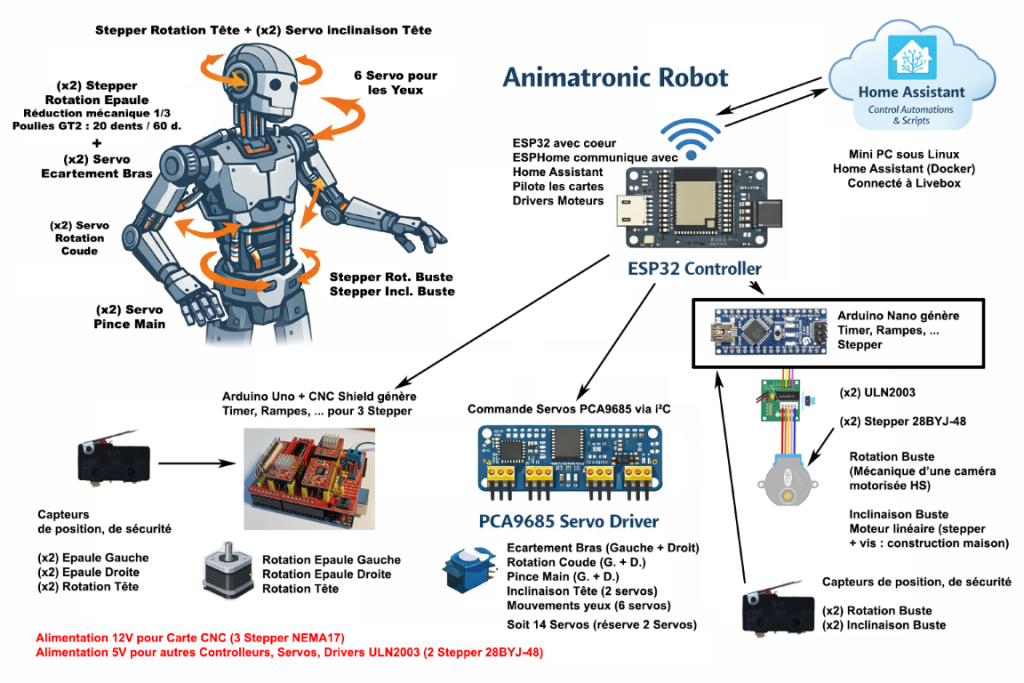
Automate constitué de 14 servomoteurs et 6 moteurs pas à pas.
Buste articulé d’environ 60 cm de haut, assis sur une chaise à l’entrée du réseau.
Visible à 180°.
Animations principales :
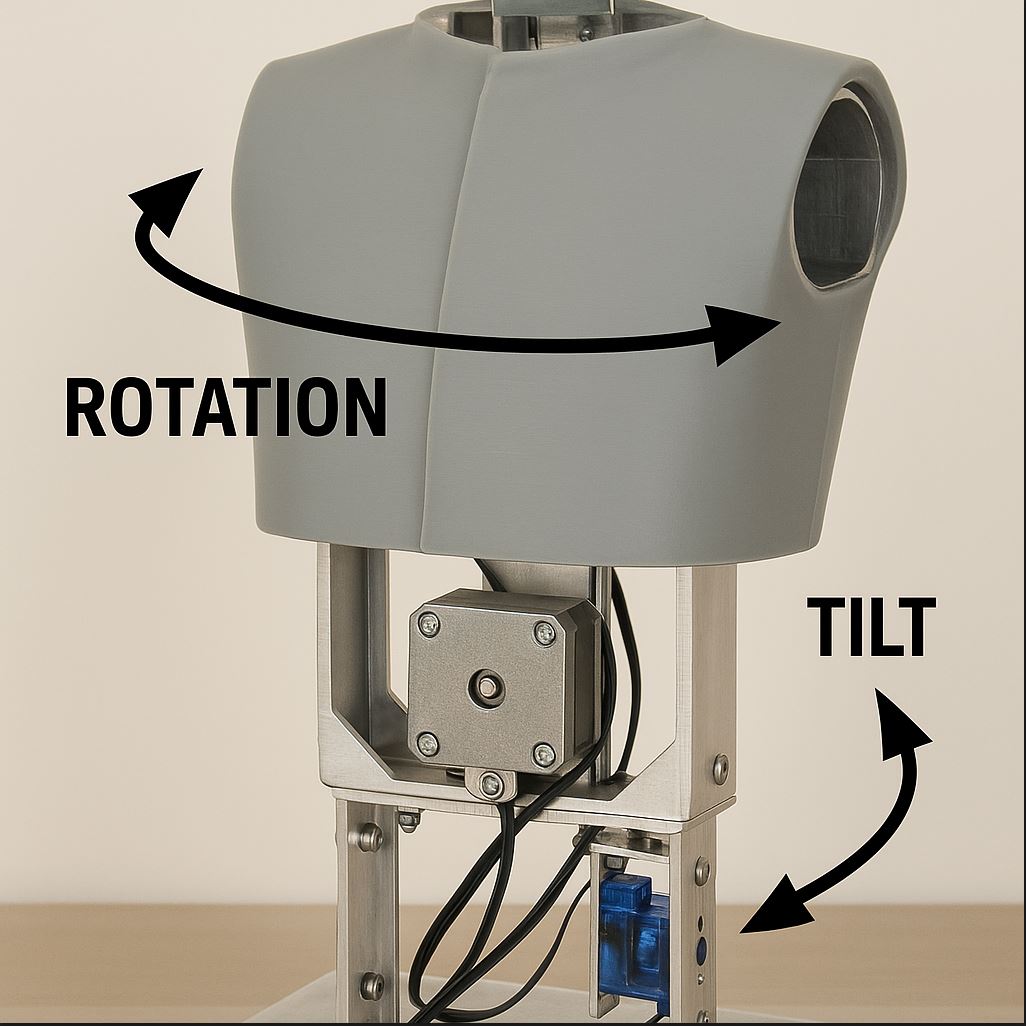
Tête expressive : rotation et inclinaison réalistes via deux servomoteurs et un système à biellettes inspiré du projet Rob Ives
Yeux indépendants : mouvements naturels, basé sur le projet de Morgan Manly.
Bouche et mâchoire : mouvements naturels et micro‑expressions pour donner vie au personnage, 1 servomoteur par joue qui tire avec un fil nylon pour simuler les mouvements de la bouche (peut-être 3 servomoteurs).
Bras à 4 axes capable de tendre un billet, de saluer, …
Buste articulé : rotation d’environ 60° et légère inclinaison pour renforcer l’impression de présence.
Technologie :
Servomoteurs pilotés par ESP32 + PCA9685.
Moteur pas à pas pilotés par cartes Arduino qui reçoit les ordres de l’ESP32 à base d’ESPHome.
Rapberry Pi2 ou > pour gérer 3 servomoteurs bouche et interaction vocale.
Pièces mécaniques imprimées en ABS, structures générale en métal et en bois.
Animations pilotées avec Home Assistant avec au final une interaction orale avec le public.
L’objectif est de créer un Chef de Gare SNCF et d’offrir une animation immersive aux visiteurs de la maquette.
Luc, Chef de Gare en 2026
Avancement :
Modification buste 2025 avec Plaque support électronique, Triangle pour inclinaison de la tête, nouvelle structure électronique et supervision
Rotation tête : Commande Arduino Uno + CNC Shield (montée sur la Uno), test de mouvements aléatoires de la rotation tête avec tempos, rampes d’accélération et décélération) –> OK
Triangle support tête manœuvré par 2 servos, inclinaison de la tête sur les côtés et en avant/arrière
Commande par stepper des deux épaules de l’automate avec Uno + CNC, mécanique qui supporte le bras, supervision identique au stepper tête avec Home Assistant (reste à affiner et dupliquer pour le bras gauche, ajouter contact position Zéro)
A faire prochainement :
Programmer ESP32 avec environnement ESPHome pour commander le stepper rotation tête via Home Assistant. Principe commande stepper : Home Assistant –> ESP32 –> (Arduino Uno + CNC Shield) –> Stepper rotation tête Élaboration protocole communication ESP32 –> Arduino Uno pour définir les mouvements [N° stepper, déplacement, rampe, sens] Principe plus général de positions réalistes ordonnées par Home Assistant via ESP32 [Tendre la main droite, Saluer, Pointer un endroit du train, Applaudir, …]
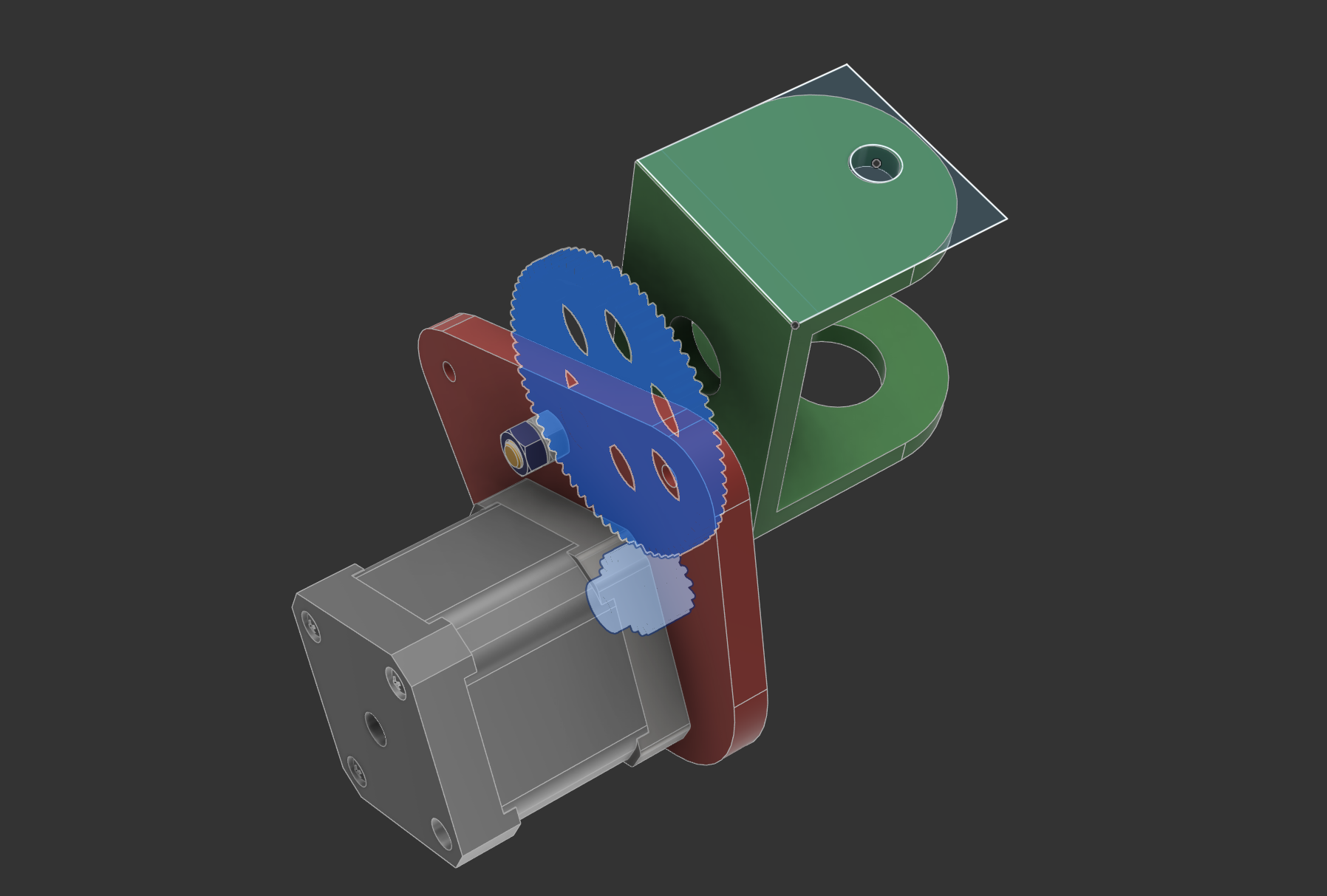
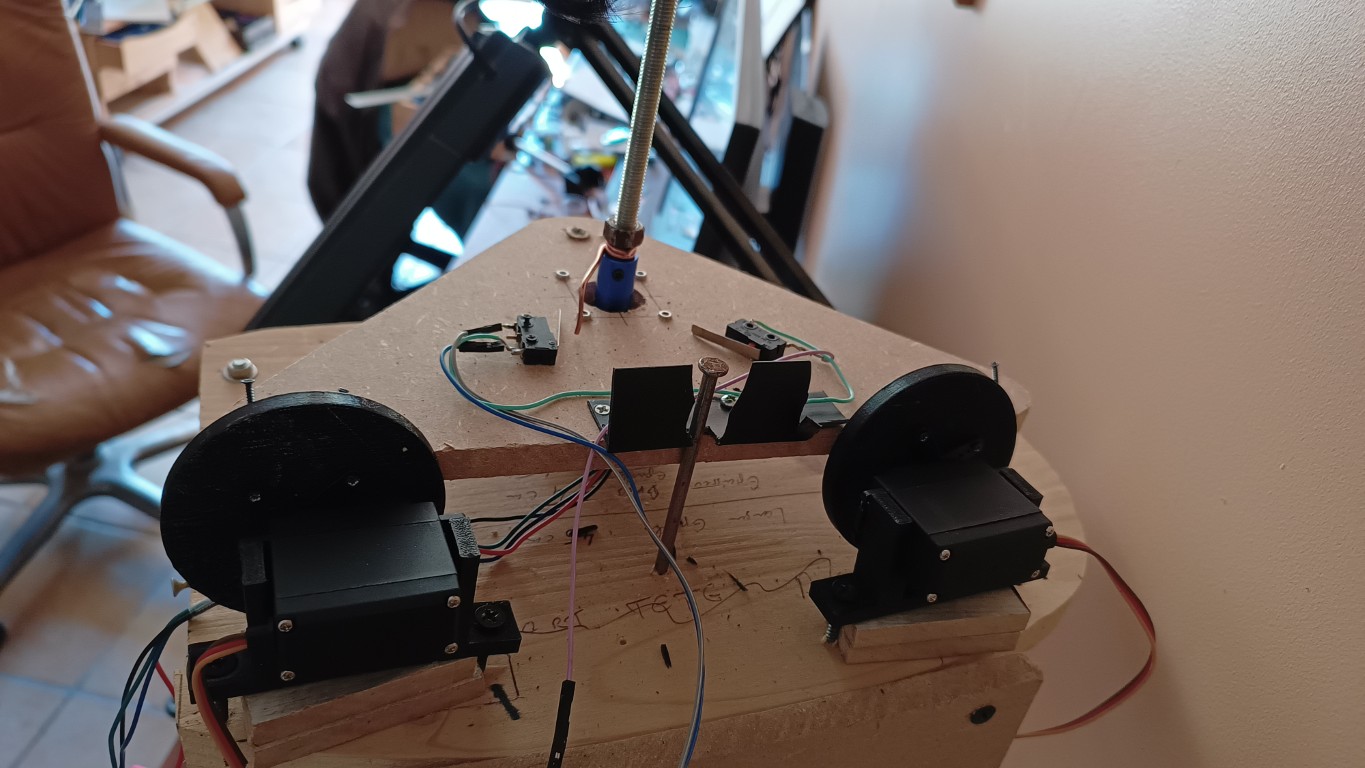
Epaule Droite Rotation
Mécanisme rotation épaule, la partie verte à été décalée pour une meilleure compréhension
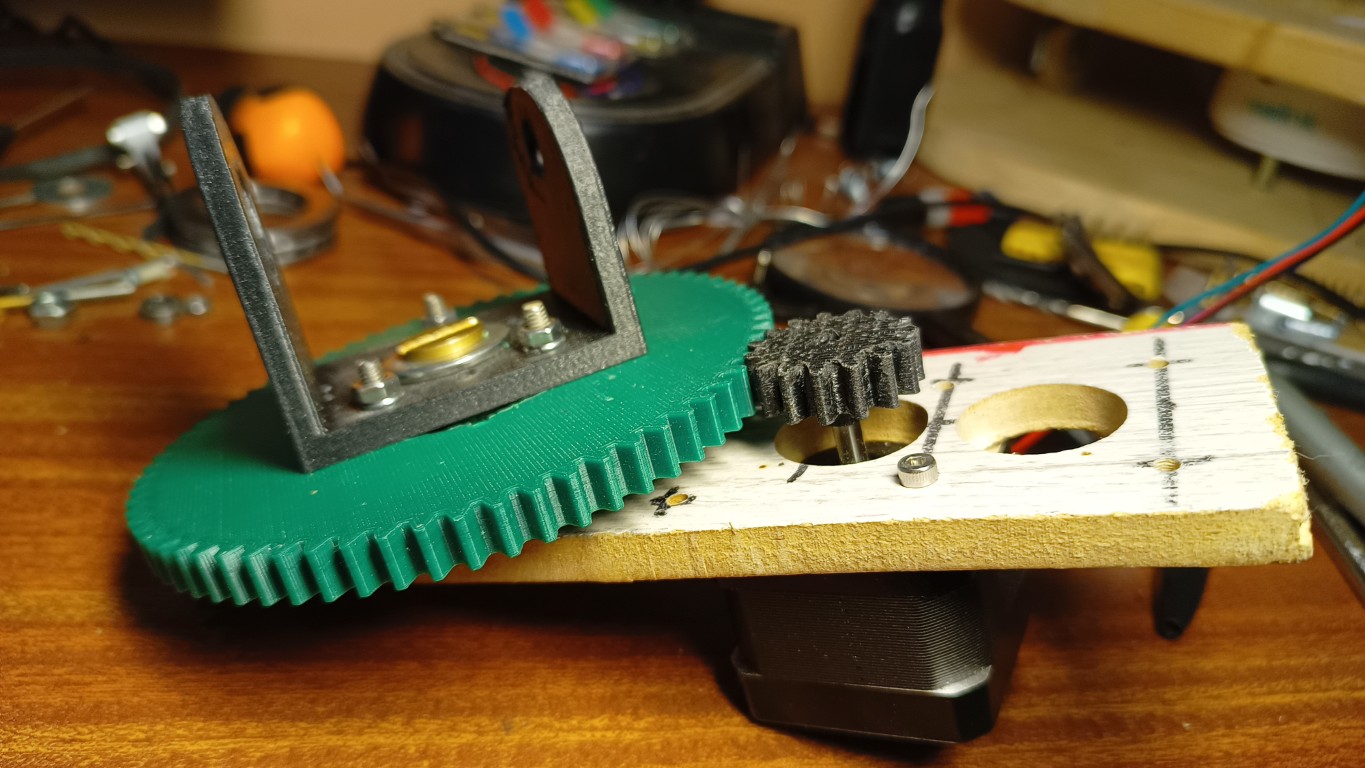
Bras au 06 04, rotation avec 2 engrenages
Très bons mouvements avec engrenages, démultiplication mécanique de 4,5
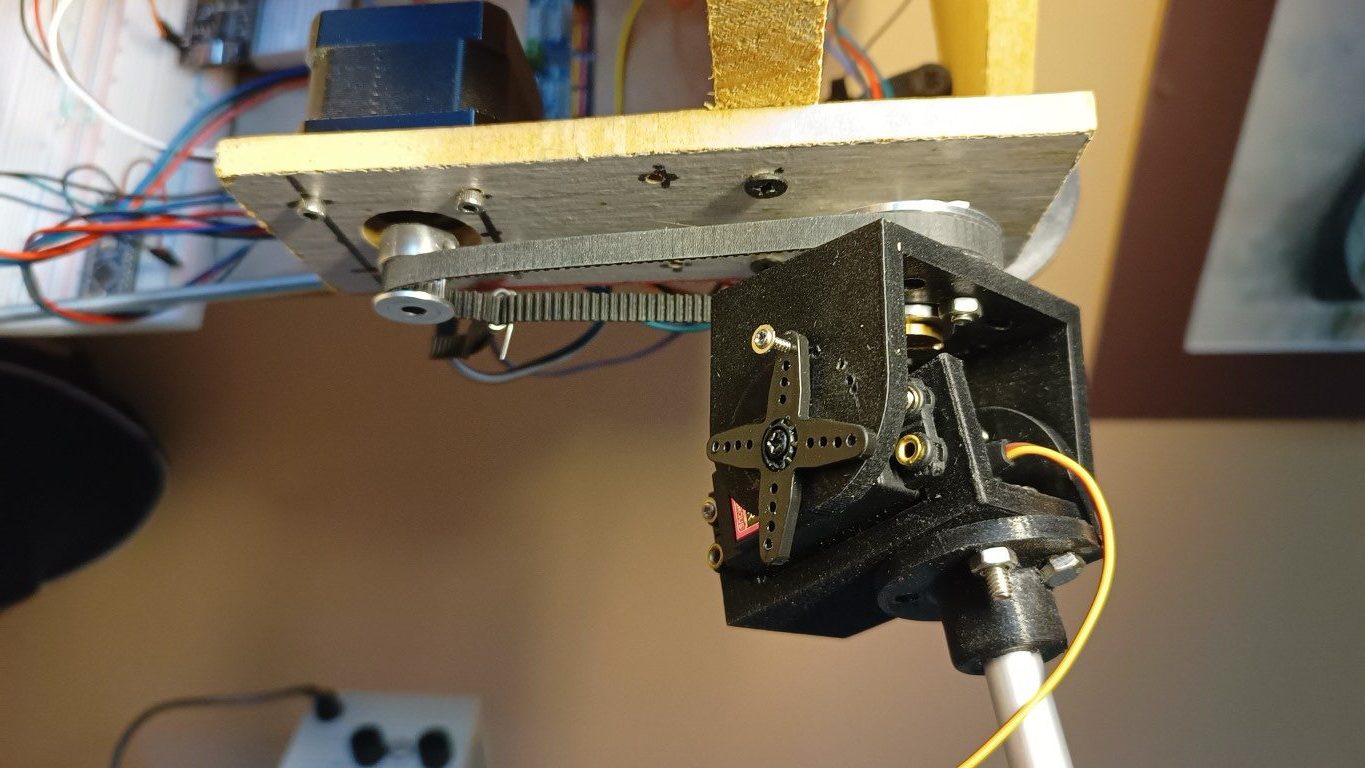
Épaule, rotation avec réduction courroie / poulies – Abandonné car elle saute
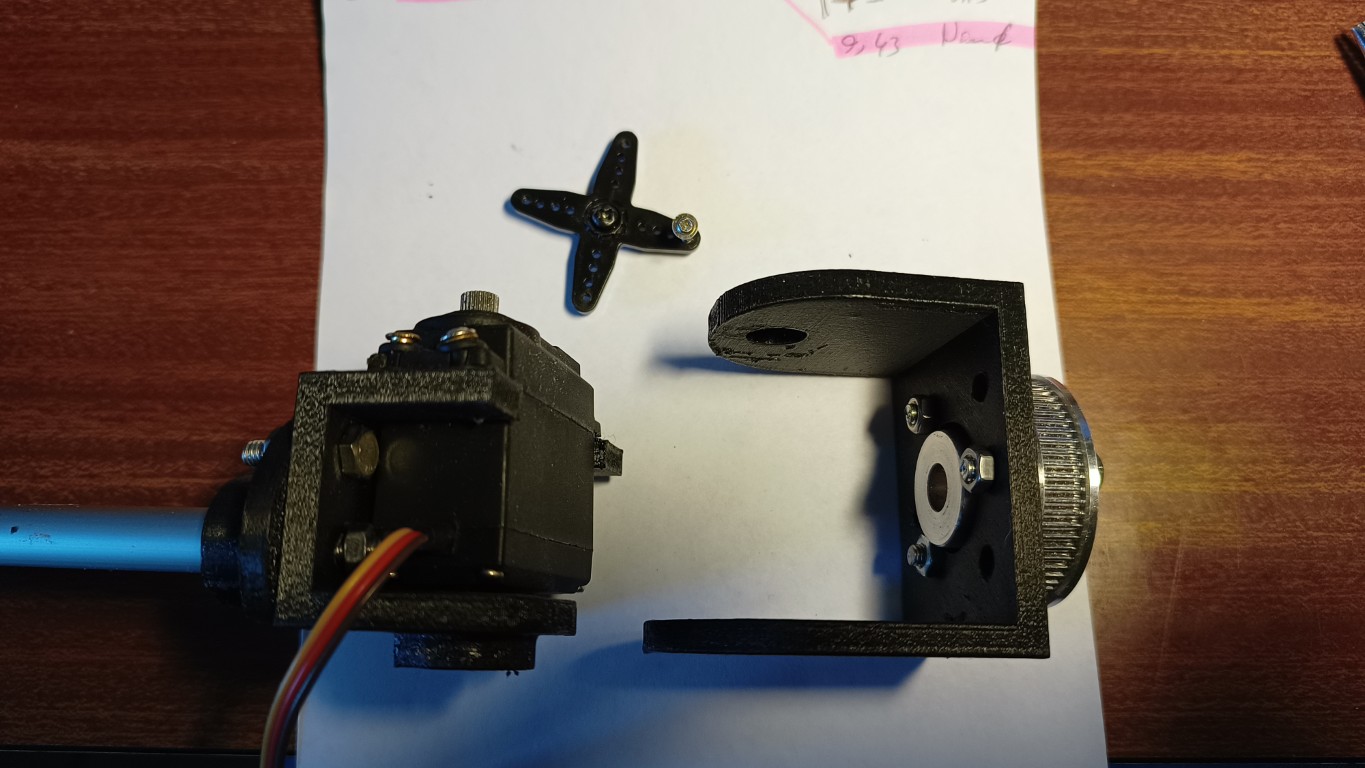
Épaule, attache à stepper rotation épaule et Servo pour écartement bras
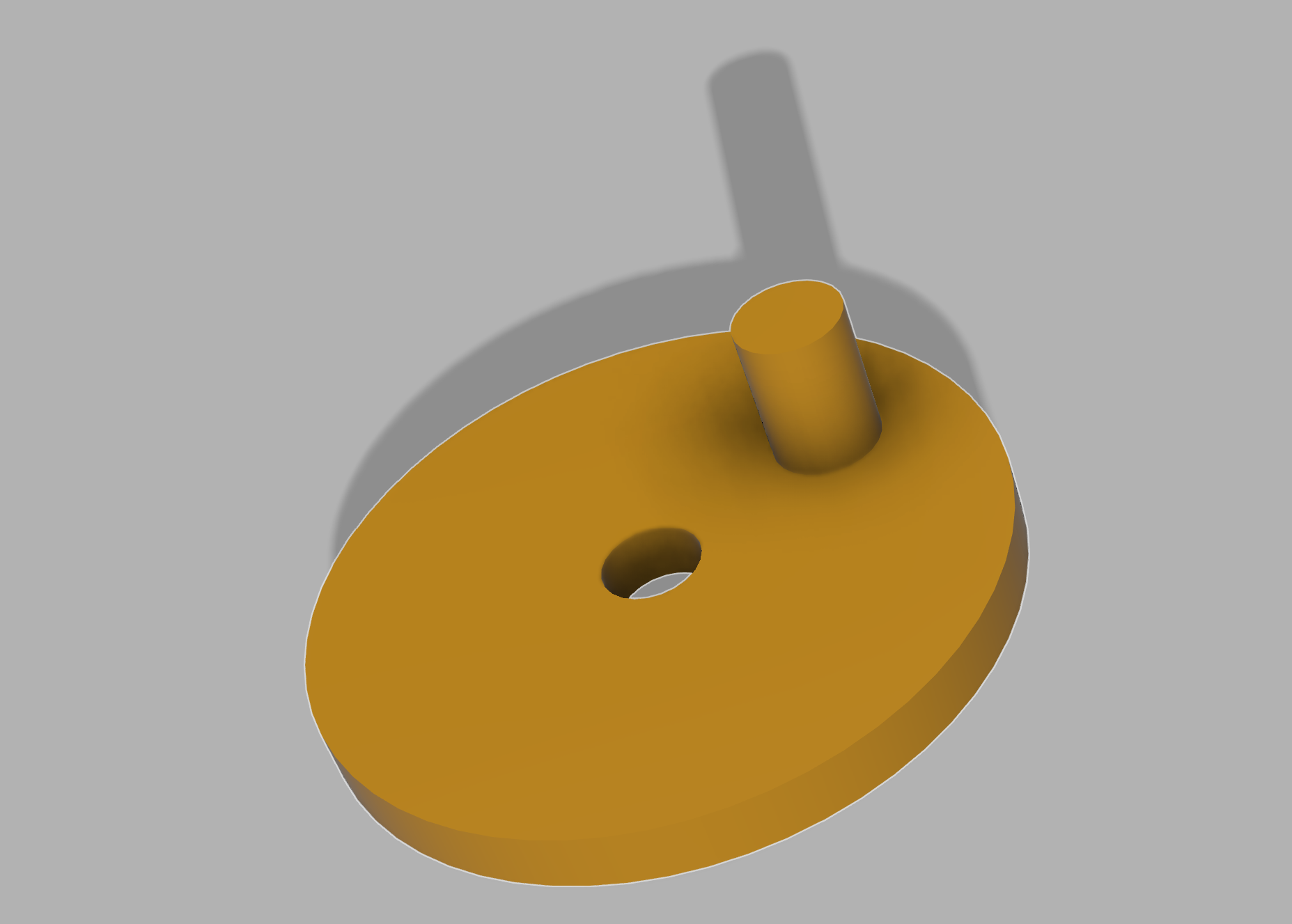
Camme inclinaison tete
Triangle en position horizontale de la tête
Triangle porte tête permettant d’incliner la tête
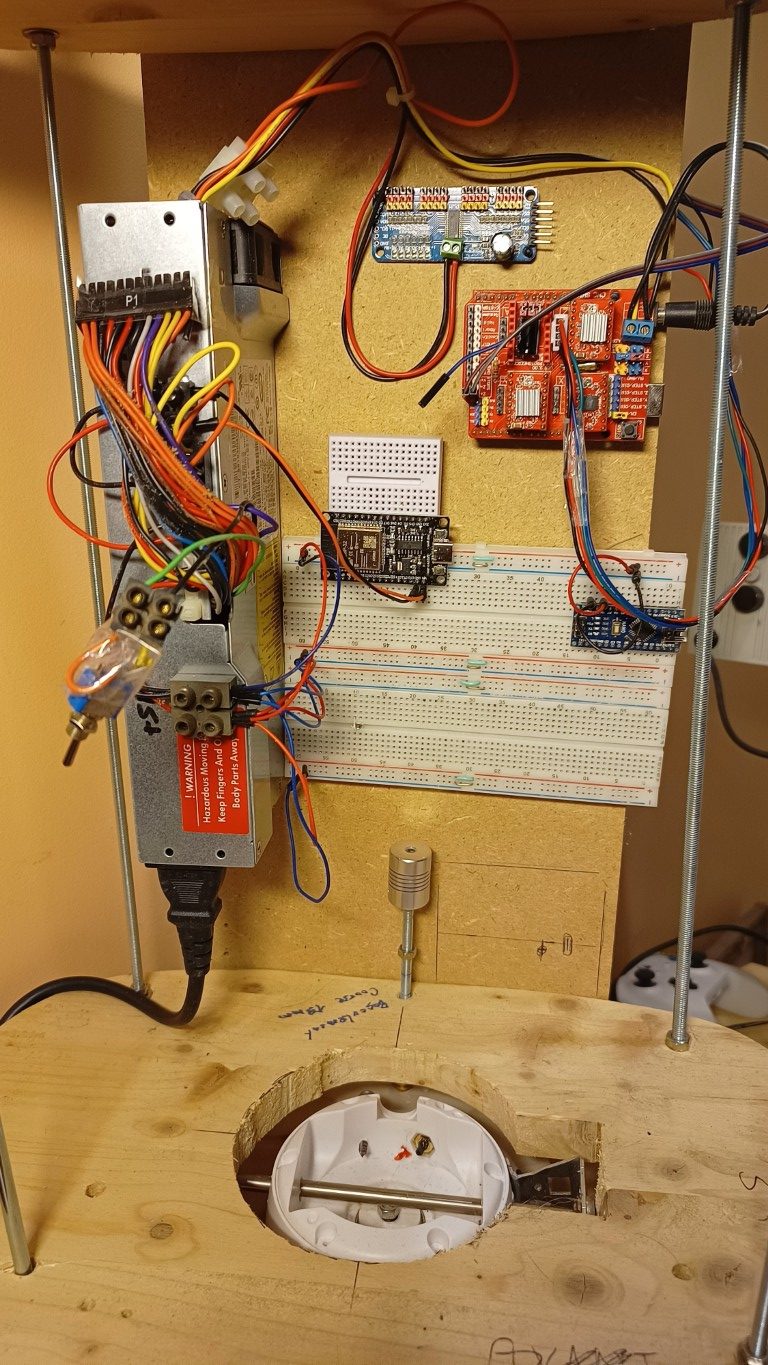
Électronique Automate qui va progressivement se compléter
Automate au 3 mars 2026
Luc, Chef de Gare en 2025
Casquette « gradé » Chef de Gare. Décorations imprimée en 3D
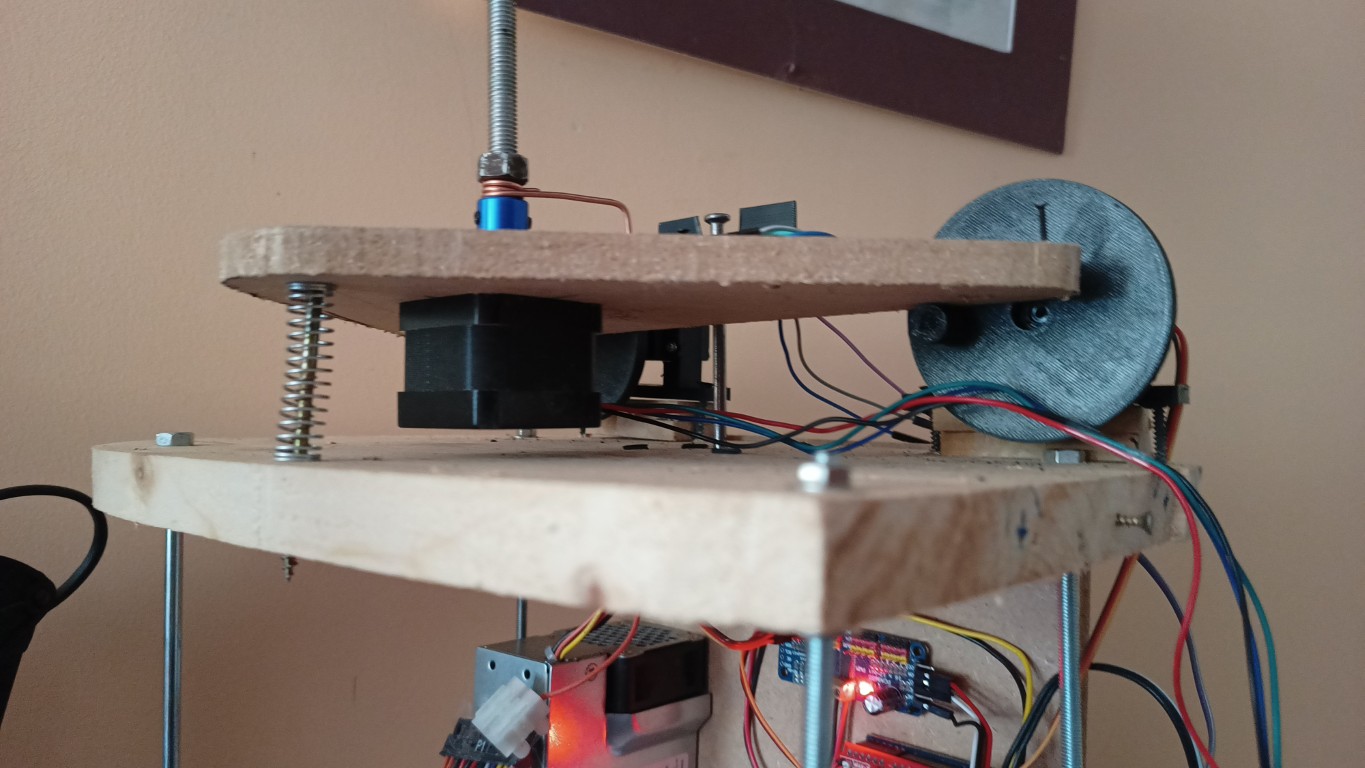
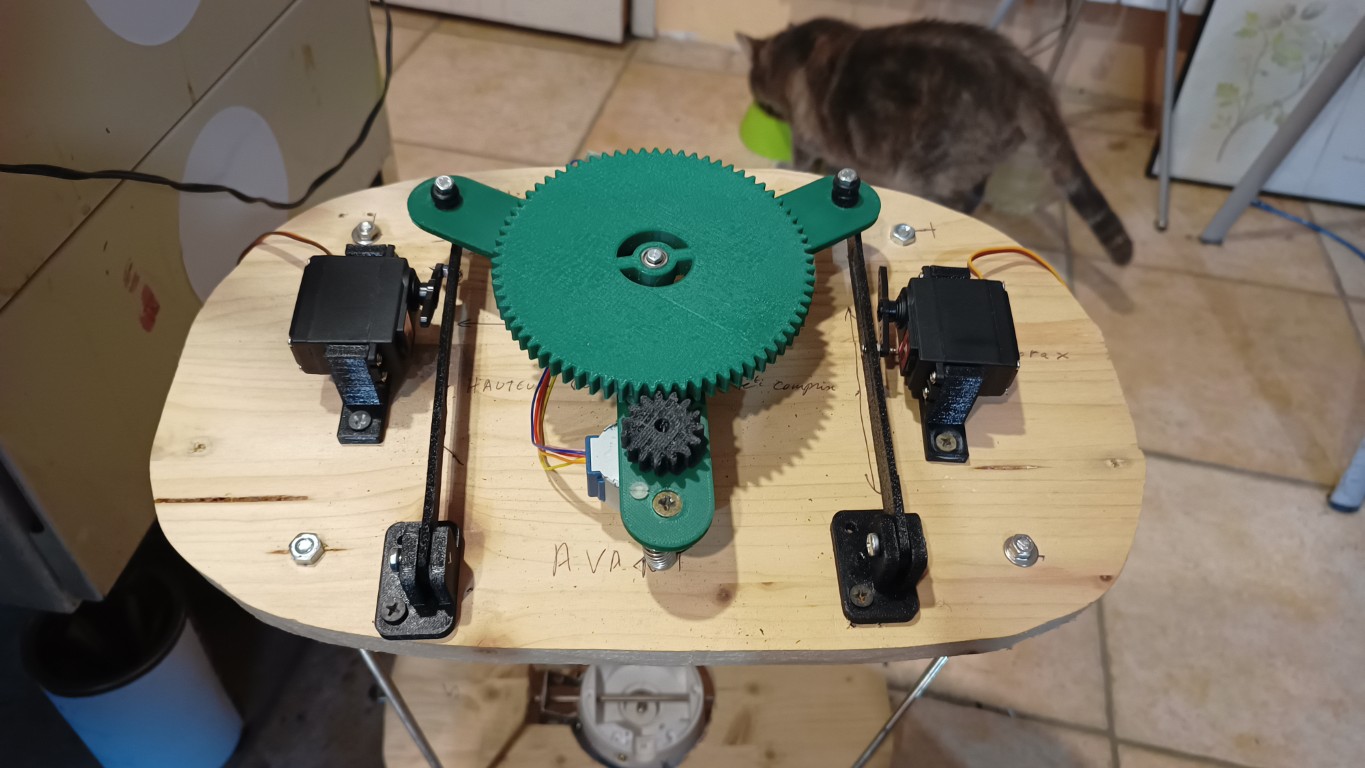
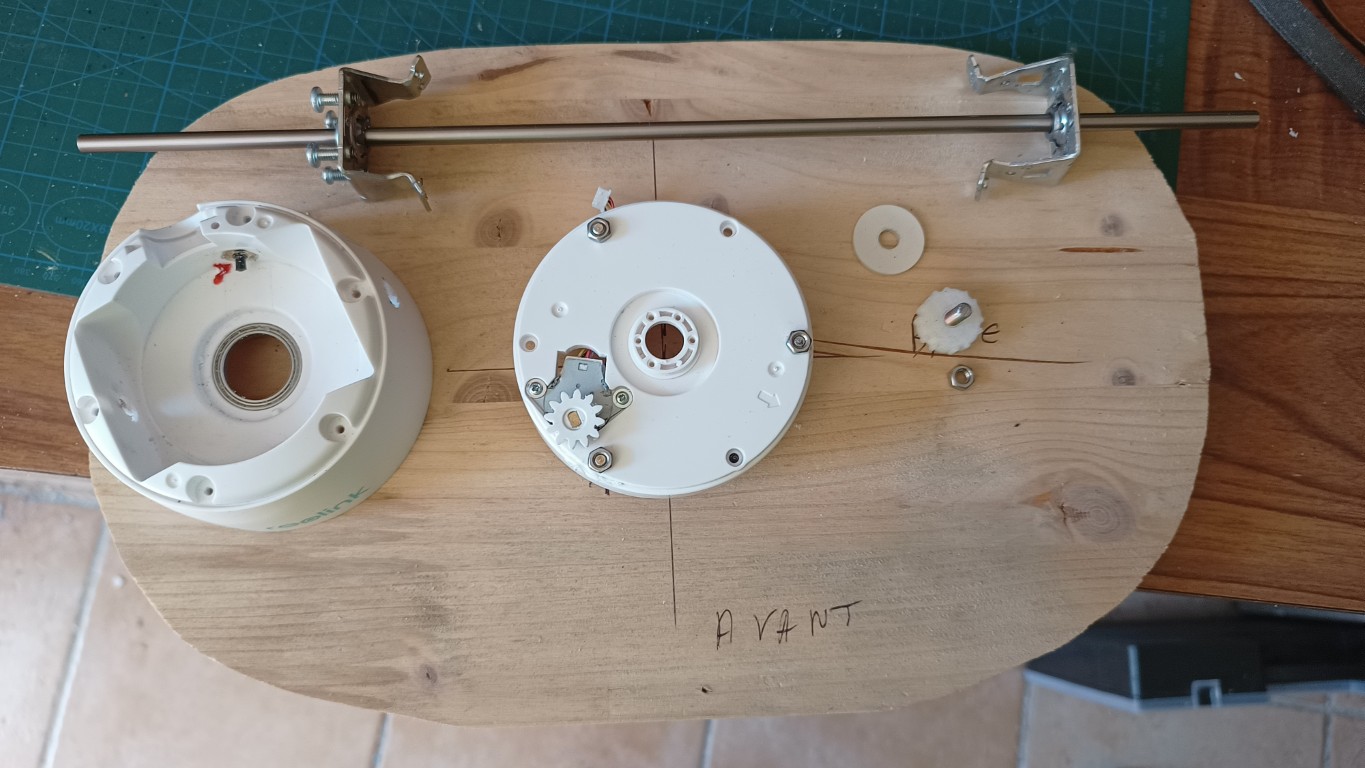
Rotation Buste (ancienne caméra motorisée)
Rotation Buste (ancienne caméra motorisée)
Conception générale
Bras robotisé « Guichetier SNCF » inspiré de Reachy
Le bras droit de l’automate sera probablement conçu sur la base de l’architecture Reachy, un bras robotique open‑source reconnu pour ses mouvements réalistes et fluides. Il dispose de trois degrés de liberté principaux :
Épaule : permet la rotation avant‑arrière et latérale pour tendre le bras vers le visiteur.
Coude : offre une flexion naturelle pour saisir ou présenter un objet.
Poignet : autorise l’inclinaison pour renforcer l’expressivité des gestes.
Grâce à cette cinématique inspirée de l’humain et à l’utilisation de servomoteurs de précision, le bras peut reproduire des mouvements crédibles de Chef de Gare :
présenter ou tendre un billet,
pointer vers un panneau d’information,
accompagner un geste d’accueil ou de validation.
L’ensemble est imprimé en 3D, léger et silencieux, optimisé pour des séquences de mouvements lents et naturels, adaptées à un environnement d’interaction avec le public.
Il y a une autre solution avec un bras ayant 5 axes de liberté à base de servomoteur à concevoir entièrement, tout un programme !
Ce sera ma première étape.
Buste motorisé de l’automate guichetier
Le buste constitue la partie supérieure de l’automate, reliant la base fixe au bras motorisé et à la tête. Il est conçu pour reproduire des mouvements réalistes d’un guichetier accueillant ou interagissant avec le public.
Fonctions mécaniques :
Rotation horizontale : ±45° (environ 90° au total), permettant à l’automate de suivre un visiteur ou de se tourner vers un poste adjacent.
Inclinaison avant/arrière : 5 à 10° pour simuler un geste d’acquiescement ou un mouvement d’attention.
Châssis interne en aluminium ou PLA renforcé (impression 3D), comportant :
un axe vertical principal pour la rotation, monté sur roulement,
un sous-châssis articulé pour l’inclinaison, avec butées mécaniques pour sécuriser la course.
Motorisation :
Moteur pas à pas pour la rotation, offrant un positionnement précis et silencieux,
Micro-servomoteur pour l’inclinaison, rapide et réactif pour des mouvements courts,
Transmission par engrenages imprimés en 3D ou courroie GT2 pour limiter le jeu.
Électronique et commande :
Pilotage par ESP8266 ou ESP32, intégré au système global de l’automate,
Détection de position par fin de course ou capteur magnétique sur l’axe de rotation,
Mouvements programmés synchronisés avec le bras et éventuellement avec un retour sonore via le DFPlayer.
Esthétique :
Carénage externe léger, imprimé en PLA, peint pour imiter l’uniforme SNCF,
Possibilité d’intégrer la tête de l’automate sur un pivot supplémentaire si nécessaire.
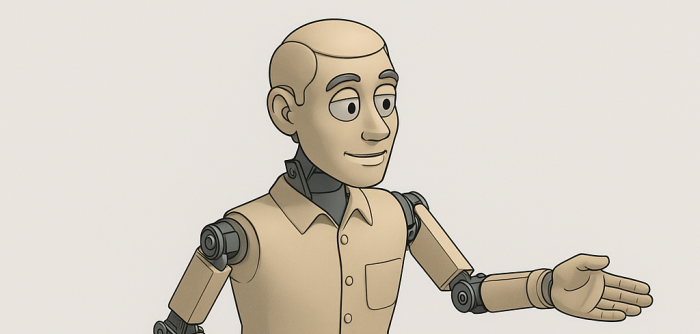
Vue sympa du guichetier, en fait Chef de gare, il ne lui manque que sa perruque et sa casquette ;-))