Pont tournant motorisé à l’échelle HO, avec système d'entrainement réalisé par une imprimante 3D
Description
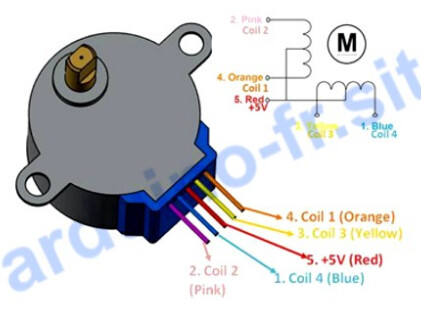
Moteur d’entrainement avec un moteur pas à pas (28BYJ-48) commandé par un ULN2003
Réduction par une roue dentée 180 mm et une roue secondaire 18 mm soit une réduction de 100, soit précision de déplacement angulaire de 4,5′
2 capteurs IR de position avec FC-51
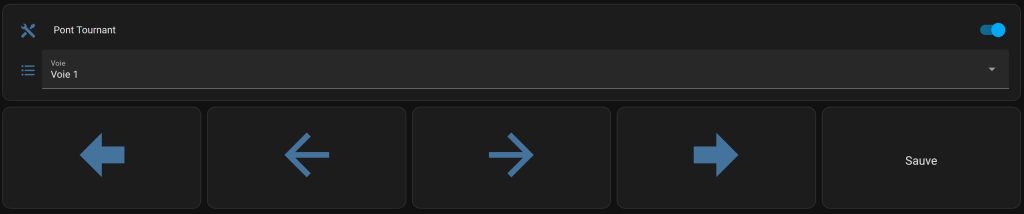
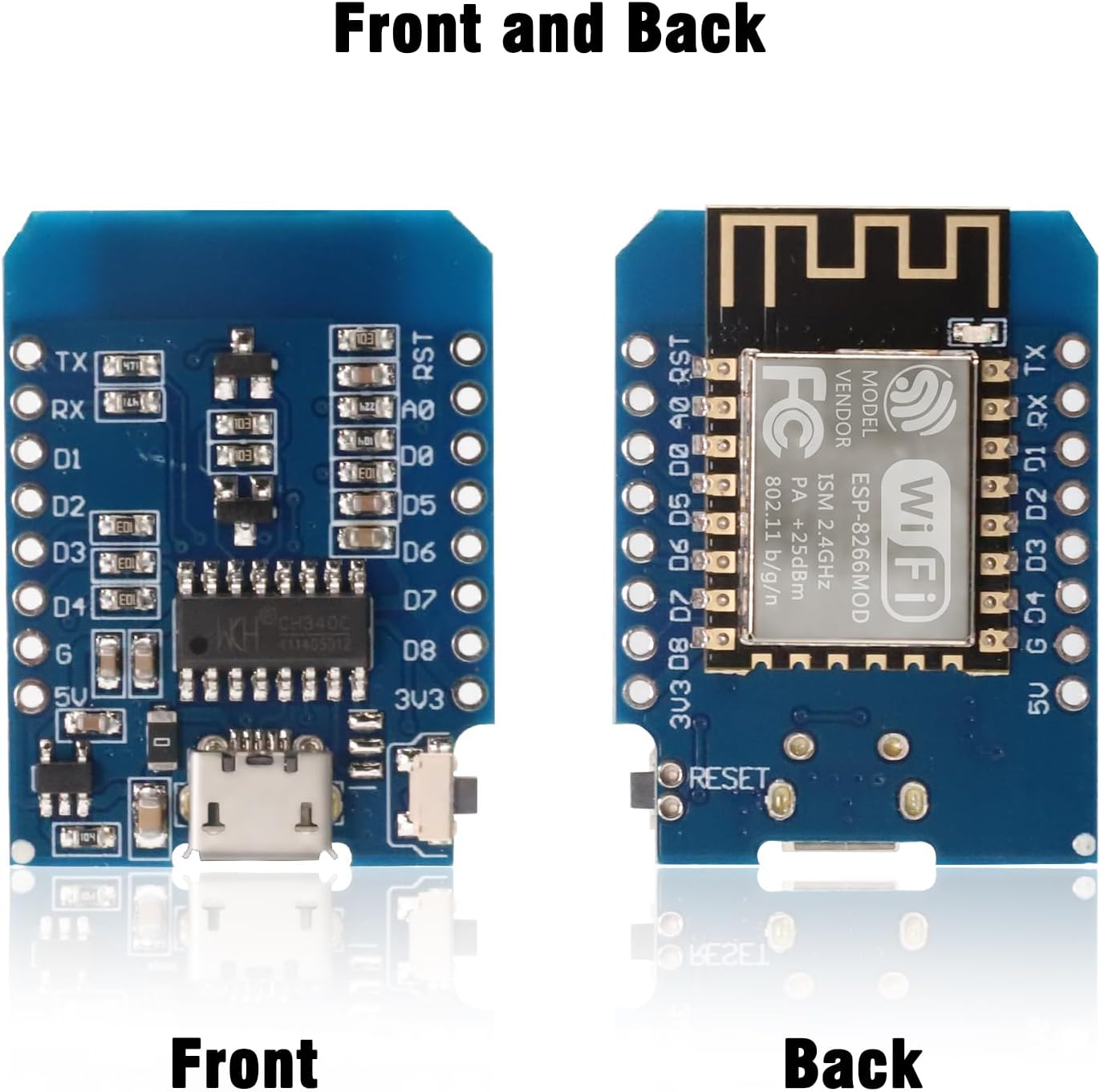
Carte de commande : ESP8266 avec cœur ESPHome
Extension E/S avec MCP23017
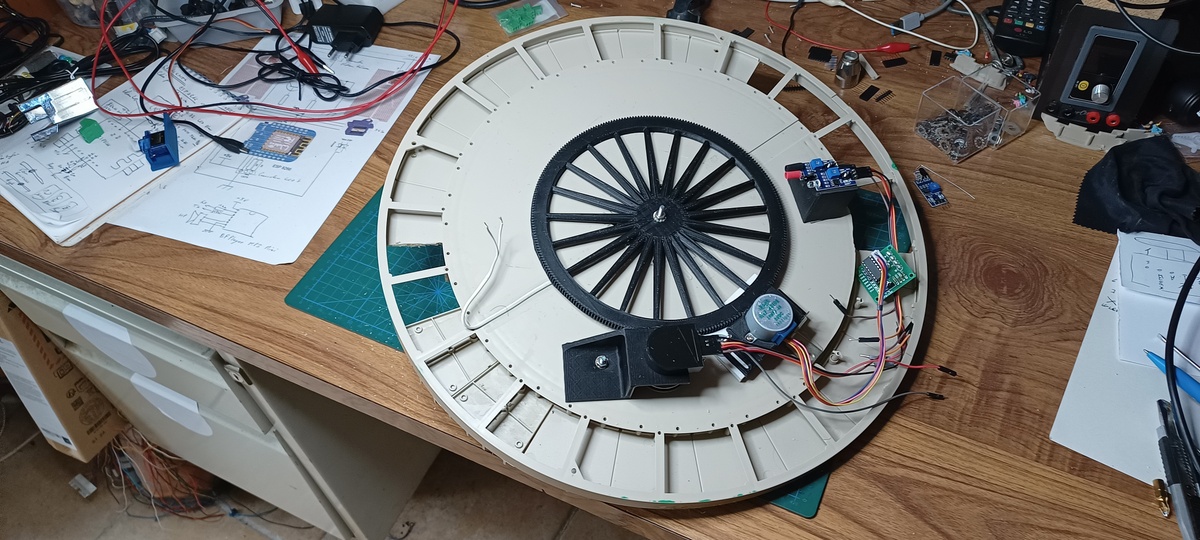
Pont tournant motorisé avec automatismes
Sous le Pont Tournant : Moteur pas à pas entraîne une roue dentée, codeur optique qui donne la position du pont
Moteur et capteurs sous le Pont Tournant
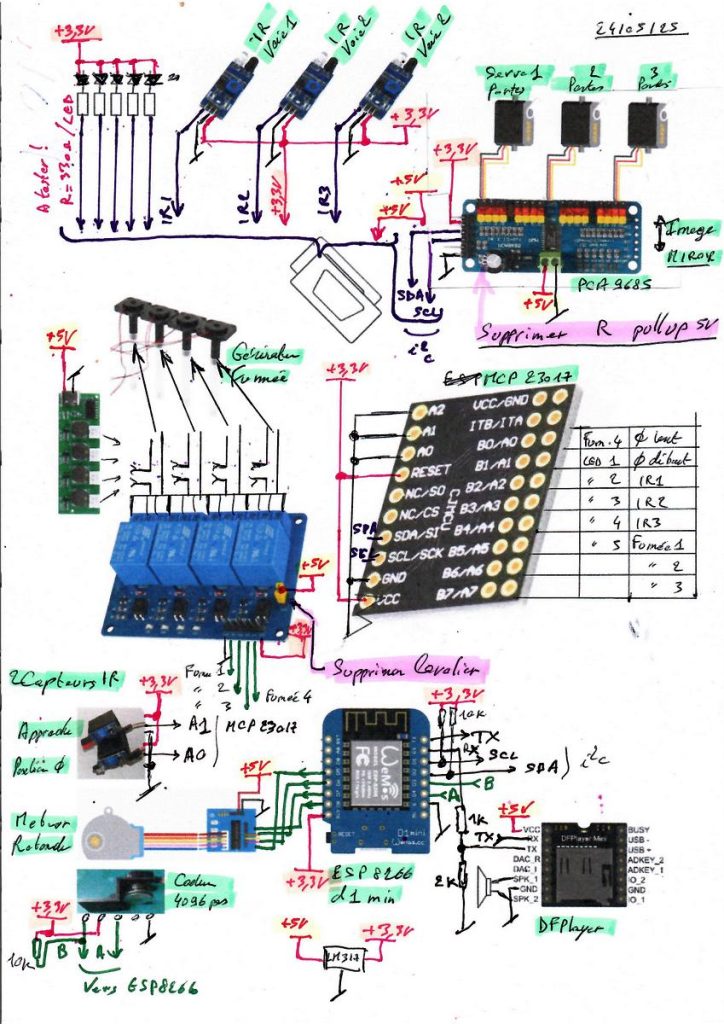
Conception
Un ESP8266 d1mini avec un cœur ESP Home permet la commande des moteurs, éclairages et sons de la zone Rotonde :
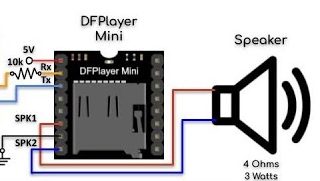
I²C SDA –> D2 (GPIO4) I²C SCL –> D1 (GPIO5) Moteur pas à pas ULN2003 –> D5 à D8 Encodeur optique A/B –> D6, D7 Index codeur ou FC-51 –> D3 DFPlayer TX/RX (SoftSerial) –> D4, RX (GPIO3) Position IR via MCP23017 –> Sur I²C Servos via PCA9685 –> Sur I²C LEDs + relais –> Via MCP23017