La Big Boy est une locomotive articulée conçue pour tracter des convois très lourds tout en
franchissant des courbes serrées. Son principe repose sur un équilibre entre rigidité et mobilité
contrôlée. Cette conception garantit puissance, stabilité et réalisme mécanique.
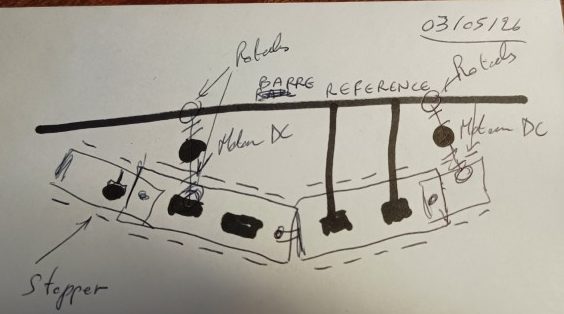
Maquette au 3 mai 2026
Moteur pas à pas linéaire fait légèrement pivoter le bogie arrière
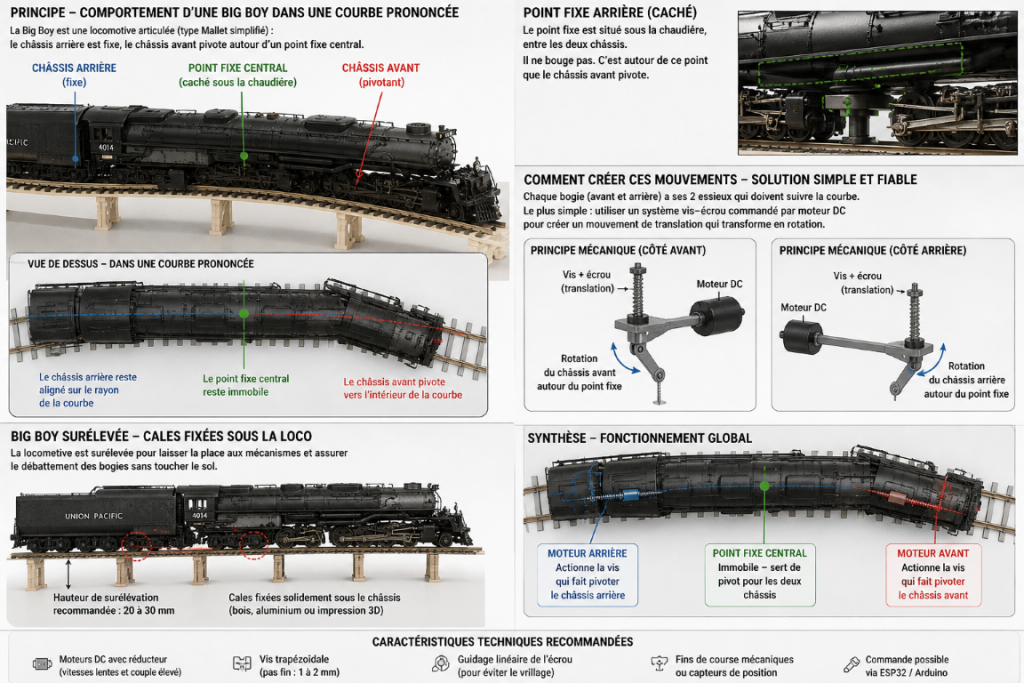
Articulation principale Big Boy
Concept : 3 pivots d’articulation
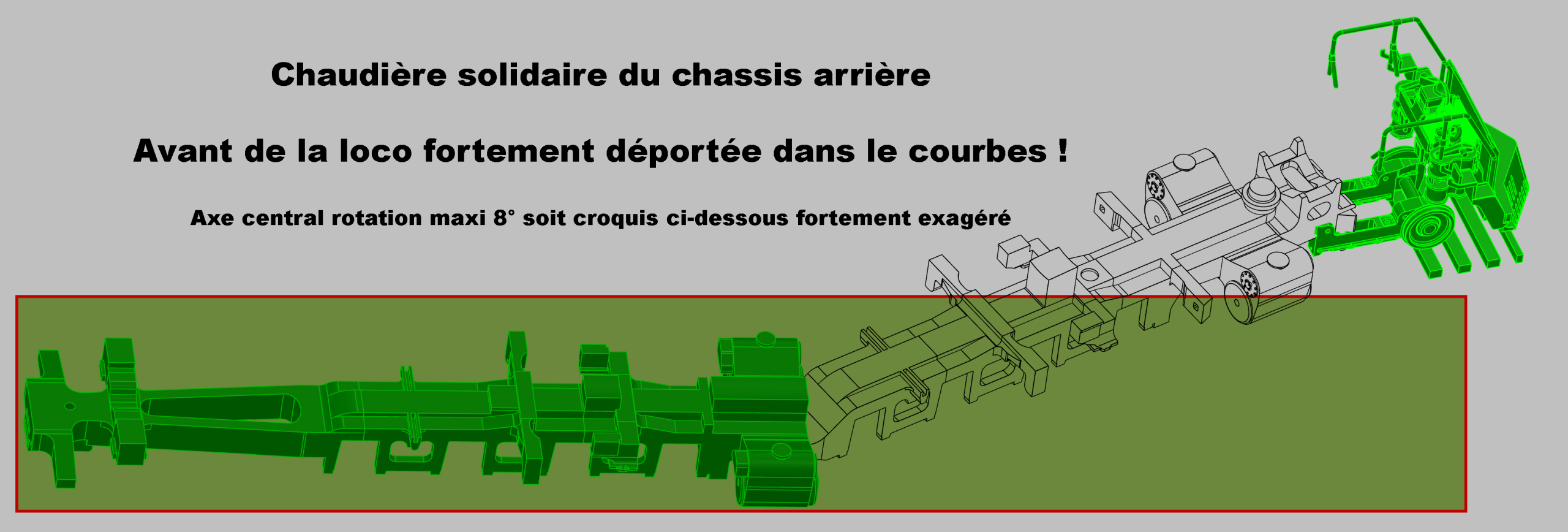
Pivot central (principal) Situé sous la chaudière, il constitue le point fixe de référence. Le châssis avant pivote autour de ce point.
Bogie avant Deux essieux mobiles guidant l’entrée en courbe.
Bogie arrière
Deux essieux mobiles assurant stabilité et adaptation. Synthèse du comportement Le châssis arrière reste aligné, le pivot central est fixe, le châssis avant pivote et les bogies s’adaptent.
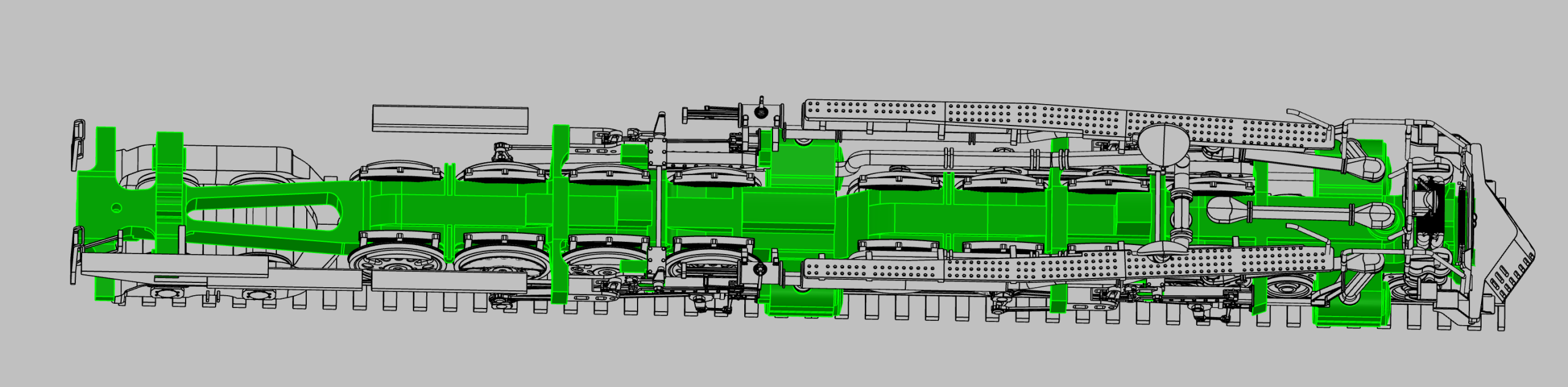
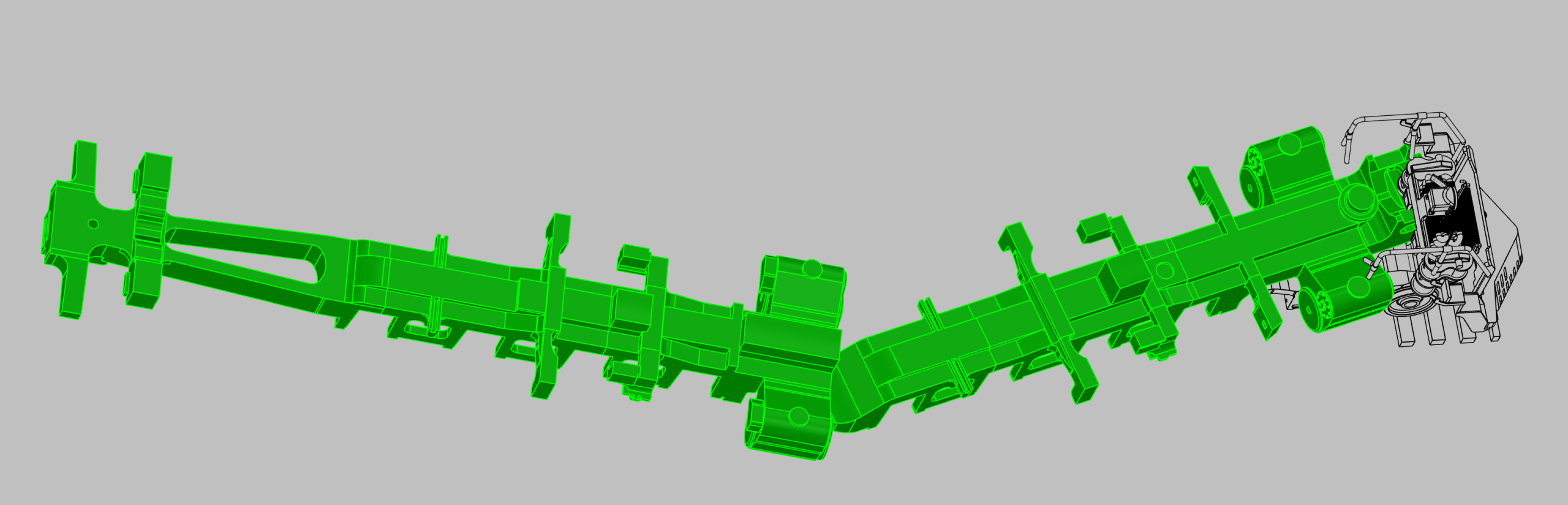
Vision des 2 châssis principaux - rotation au centre
Position de la chaudière dans une courbe prononcée
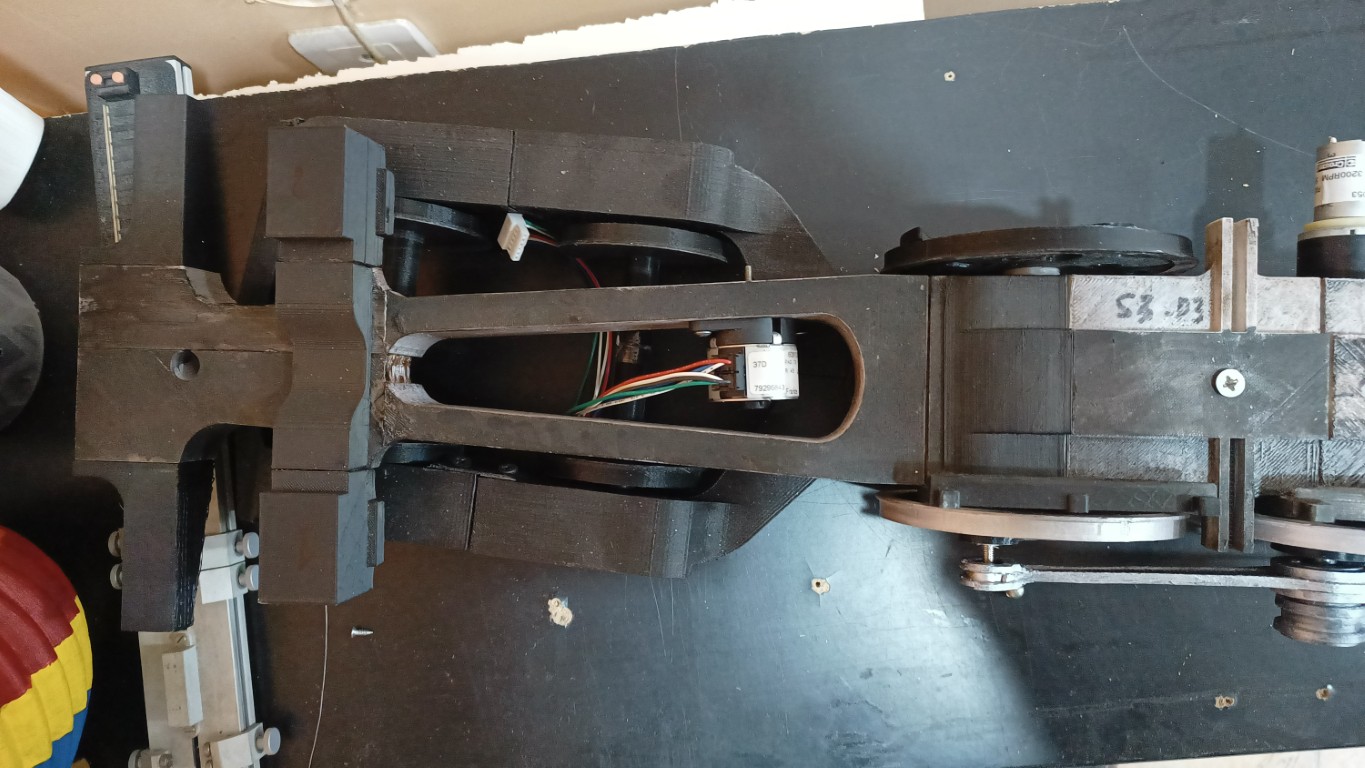
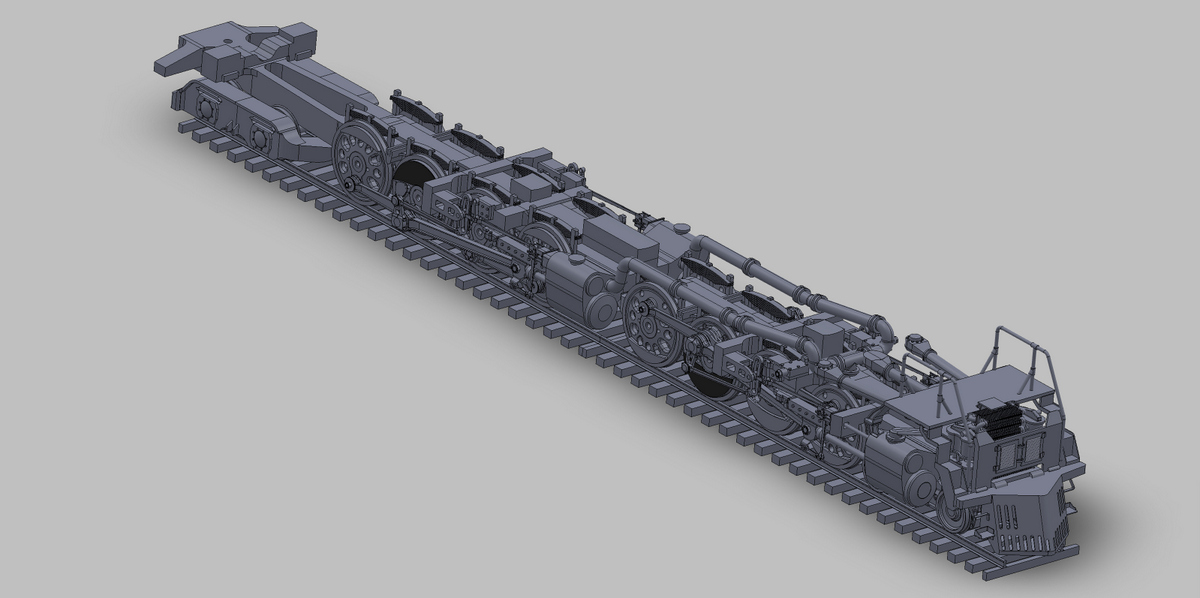
Coupe des 2 châssis principaux montrant axe de rotation au centre, petit trou à gauche pour rotation bogie arrière, tenon à droite pour bogie avant
Comportement et simulation de la Big Boy dans les courbes, donne des idées mais faux
Le châssis avant est fixe, châssis arrière tourne un peu qui entraîne le bogie arrière (qui peut lui aussi bouger de quelques degrés avec stepper linéaire), le boggie avant peut lui aussi bouger de quelques degrés.
Une barre cachée derrière la loco sera la référence, pièce de bois d’un mètre cinquante de long fixée à l’étagère, supportant l’électronique Big Boy (alim, ESP32, PCA9685, …) et le support du paysage tournant en arrière plan donnant l’illusion que la loco bouge !
Moteur linéaire 6 cm en 2 minutes constitué d’un petit motoréducteur DC alimenté sous 5V, vitesse connue donc déplacement maitrisée avec la durée d’alimentation en tout ou rien (0V / 5V) Principe vis du commerce + écrou + tube alu qui emprisonne l’écrou et de l’autre côté aplati et percé pour faire une rotule, coût total environ 4 € !
Il entraine la deuxième partie – appelé châssis arrière 3eme partie fixe, solidaire de la barre de référence
La partie notée stepper (1ere partie) est l’arrière de la loco, il y a un moteur pas à pas linéaire (12 mm de course) Crouzet haute précision acheté quelques € à la brocante.
Il y aura un 2eme moteur linéaire course 20 mm pour gérer la partie 4 (avant loco) avec un petit motoréducteur DC
Mouvement exagéré des 2 châssis pour montrer 2 des articulations : au centre et à droite
Vision des 2 châssis principaux – rotation au centre
Coupe des 2 châssis principaux montrant axe de rotation au centre
Vue base Big Boy
Moteur pas à pas linéaire fait légèrement pivoter le bogie arrière
moteur linéaire économique
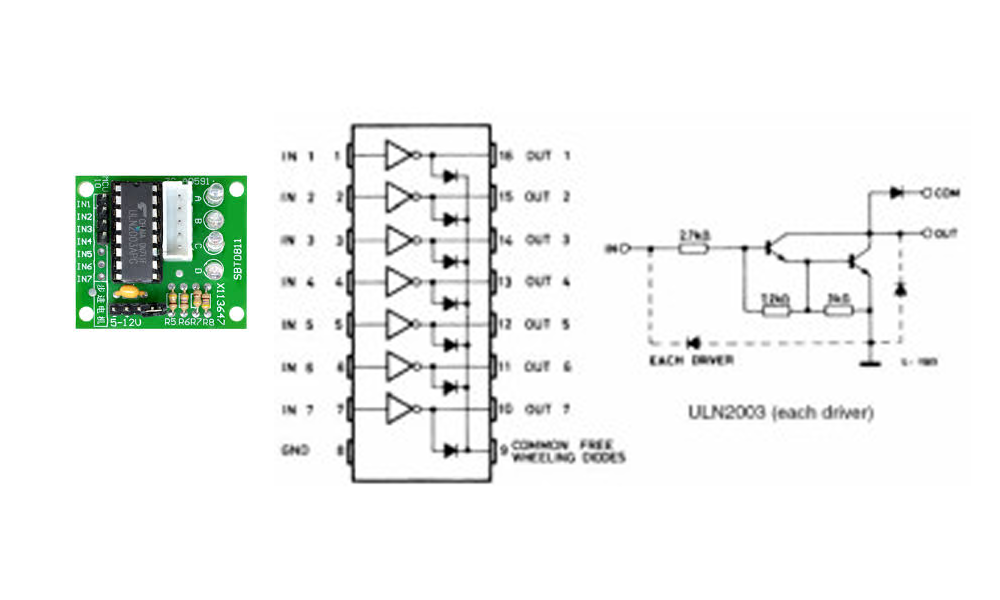
ULN2003 simplifie le câblage
A faire
Ce qui avance est en GRAS !
Barre de référence à l’arrière de la loco 150 x 10 x5 cm (reste d’un plan de meuble récupéré) qui sera fixée sur le plan support de la loco
Fixer le châssis avant (fixe) sur cette référence, installer les 2 moteurs linéaires maison via rotule (tube alu écrasé), installer 2 capteurs fin de course par moteur (dont un détection point zéro)
Créer moteur linéaire 1 (6 cm de course), linéaire 2 de course 20 mm à base de vis + écrou + coupleur + motoréducteur DC
Commande moteur DC : 1 relais pour inversion sens 2 sorties PWM, ULN 2001 utilisé comme interface pour commander relais inversion phase avec PWM_1 et alimenter moteur DC sous 5V – 14 mA de consommation. C’est un peu compliqué mais cela évite du câblage 2 x (2N2222 + R + Diode de roue libre) Attention de ne pas inverser sens de rotation, il faut d’abord couper l’alimentation PWM_2
Fixer alimentations à découpage sur barre de référence sortie 5V et une de 12 V, masse commune